![]()
Zuletzt besucht
Ausgewählte Projekte
- Platinen ätzen
- Das M.T.F.
- Bürstenloser-Motor Treiber
- Nintendo DS Mod
- Handy Modifikation
- STM32F429 Mac Tutorial
Web Applikationen
Links
Andere Projekte
- Kettensägen Fahrrad
- STM32F429 LCD Beispiel
- Mein PHP Content Managing System
- PHP Bildverarbeitung
- Rücklauftransformator-Treiber
- Atari Punk Konsole
- Teensy - ESP8266 - Interface
- Handy Ladestation
- 4-Bit Addierer
Meta
Das Multi-Terrain-Fahrzeug, ein >30kg schwerer Eisenkoloss
Jan 2015Das Multi-Terrain-Fahrzeug (M.T.F.) ist mein größtes und zeitaufwendigstes Projekt bisher. Im Bauprozess habe ich Schweißen, das Arbeiten mit Metall und Kunststoffen sowie das Planen von komplexen Konstruktionen gelernt. Darüber hinaus habe ich meine Fähigkeiten im Platinen-Entwurf, im Programmieren und im Platinen ätzen verbessert.

 Klicke auf ein Bild um es zu vergrößern
Klicke auf ein Bild um es zu vergrößern
Das M.T.F. Projekt habe ich zusammen mit einem Kumpel in April 2012 angefangen. Unser Traum war es, einen Panzer zu bauen, der Kanonen hatte und Feuerwerksraketen schießen konnte. Nach einer Woche Brainstorming wurde uns klar, dass wir beide sehr unterschiedliche Ideen davon hatten, wie das Fahrzeug am Ende aussehen sollte. So plante jeder an seinem eigenen Roboter. Im Nachhinein verbesserte diese Entscheidung unsere Zusammenarbeit, da wir uns nicht über Planungsdetails stritten, sondern uns gegenseitig mit unseren Problemen halfen. Ich war elektrotechnisch veranlagt und mein Kumpel hatte Maschinenbau im Blut, zusammen hatten wir also ein sehr breites Wissensspektrum, welches größtenteils durch praktische Erfahrungen genährt wurde.
Nach der Brainstorming-Phase fingen wir an das untere Gestell zu schweißen. Wir kauften die 12mm Vierkantstangen des nächstgelegenen Baumarkts leer und besuchten Fahrradläden, um ihren Eisenmüll durchzuwühlen. So kamen wir für 0€ an mehrere Kilo Ketten und Zahnräder, die wir so sehr brauchten. Mit den Vierkantstangen wurde das Gestell geschweißt und die Fahrrad-Ketten wurden zu Panzerketten. Aber je länger ich am Bauen der Panzerkette war, desto weniger war ich von der Idee der Panzerkette überzeugt. Ihr großer Nachteil ist, dass in Kurven sehr große Scherkräfte auf das Fuhrwerk und die Achsen wirken. Maximal werden diese wenn der Roboter auf der Stelle drehen soll. Dies traute ich den Achsen nicht zu, also kaufte ich schöne, dicke Gummireifen für Sackkarren. Diese hatten einen einen größeren Durchmesser als die Antriebszähnräder der Panzerketten, was bedeutete, dass der Roboter eine höhere maximale Geschwindigkeit erreichen konnte. Da die Reifen luftgefüllt waren, wurden ebenfalls Vibrationen und Fahrgeräusche gedämpft, was der Elektronik und dem Gesamtauftritt des Fahrzeugs guttat.
Das nächste Problem war es, günstige und starke 12V Motoren zu finden, die mit möglichst wenig Aufwand als Fahrmotoren zu gebrauchen waren. Wir schauten uns ein wenig um und fanden die am besten geeigneten Motoren auf dem Autoschrottplatz – Scheibenwischermotoren. Wir bekamen 4 Motoren für 20€, sie liefen auf 12V und waren stark genug. Die einzigen Nachteile sind, dass die Motoren nicht sehr effizient sind und in einer Richtung ein wenig schneller drehen als in die andere. Wir verbauten zwei Motoren pro Roboter, einen für jede Seite (links und rechts). Dann schlossen wir sie an eine 12V Bleisäure-Batterie an und hatten unseren ersten fahrenden Prototypen: Ein flaches Stück Metallkonstruktion.
Nach diesem frischen Schub Erfolg ging es nun an das obere Gestell. Ein Fahrzeug braucht ja nun mal ein Chassis. Dieses Konstrukt war viel komplizierter zu bauen als das untere Gestell. Man musste die Eisenstangen nicht nur zurechtsägen und schweißen, man musste sie dazu noch biegen und schauen, dass alles auf das untere Gestell passt. Als Verkleidung wählte ich Kunststoffplatten, die auch zurechtgeschnitten und mit dem Gestell vernietet wurden. Um die Kanten zu schützen vernietete ich zusätzlich noch Aluminium-Eckstangen.
Nachdem ich und mein Kumpel das obere Gestell unser beider Roboter fertig gestellt hatten, verbrachten wir zwei Tage damit, die Fahrzeuge schön anzumalen.


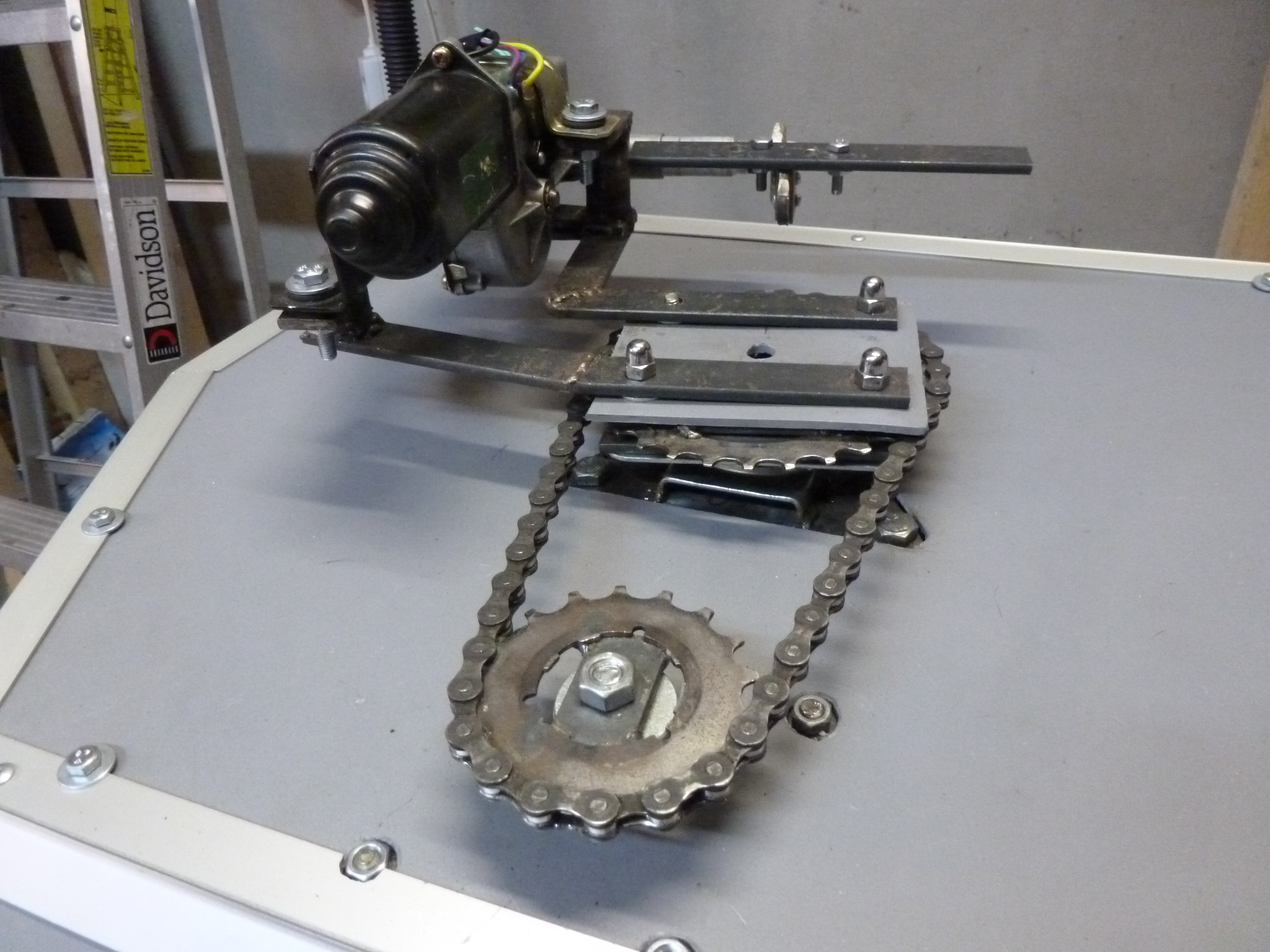
Das Geschütz ist die Krone der Roboter und beanspruchte die längste Planungszeit. Es sitzt oben auf der Mitte des Fahrzeugs und ist durch ein Lager in jede Richtung drehbar. Das Lager selbst war eine Rolle eines Einkaufswagens, wobei der gesamte Rollen-Teil abgeschnitten wurde. Ein Scheibenwischermotor treibt eine Fahrradkette an, die um ein größeres Zahnrad läuft, welches fest mit dem Geschütz verbunden ist. Ein weiterer kleiner Scheibenwischer-Motor sitzt auf dem Geschütz und stellt den Schusswinkel der Kanonen ein.

Als Kanonen kann man zwischen „Böllerkanonen“ und „Raketenwerfern“ wählen. Böllerkanonen sind einfache Rohre, in die ein D-Chinaböller passt. Ein Raketenwerfer ist auch nur ein Rohr, in das man eine Feuerwerksrakete steckt. Gezündet werden die Feuerwerkskörper mit einem Glühdraht, welcher aus 12V Auto-Zigarettenanzündern entnommen wurde.
Im Falle der Böllerkanone explodiert dann der Böller und kann Projektile bis zu 40 Meter weit schießen.
Beim Raketenwerfer muss man nur zünden und die Feuerwerksrakete schießt in die gewünschte Richtung.
Während der gesamten Bauphase war ich am entwerfen und ausbessern der Elektronik. Zunächst war die Elektronik nur ein paar Schalter, mit denen man manuell einzelne Motoren an- und ausschalten konnte. Version 2.0 war eine Schaltung aus einem alten ferngesteuerten Auto, wobei die eigentlichen Motoren-Ausgänge an Relais gingen, die in der Lage waren den viel größeren Strom zu schalten. Um diese Zeit herum fing ich an, meine eigenen Platinen zu ätzen. Zunächst funktionierte es nicht sehr gut, aber mit der Zeit wurde ich immer besser darin und habe nun sogar ein eigenes Tutorial dazu gemacht (Link zum Tutorial).
Die finale Schaltung bestand aus 2 atmega328 Mikrocontrollern, die Befehle von einem Playstation 2 Controller empfingen und die H-Brücken für die Motoren mit PWM ansteuerten, sowie die Relais der Kanonen schalteten. Den gesamten C-Code, mit Ausnahme der PS2-Controller-Library, habe ich selbst geschrieben. Die PS2-Library habe ich hier her.
Vom fertigen Resultat war ich und mein Kumpel begeistert. Es war wie Videospiel spielen! Mit dem linken Analogstick steuerte man die Fahrmotoren, mit dem rechten das Geschütz und mit den vorderen Bumpern konnte man die Kanonen zünden.

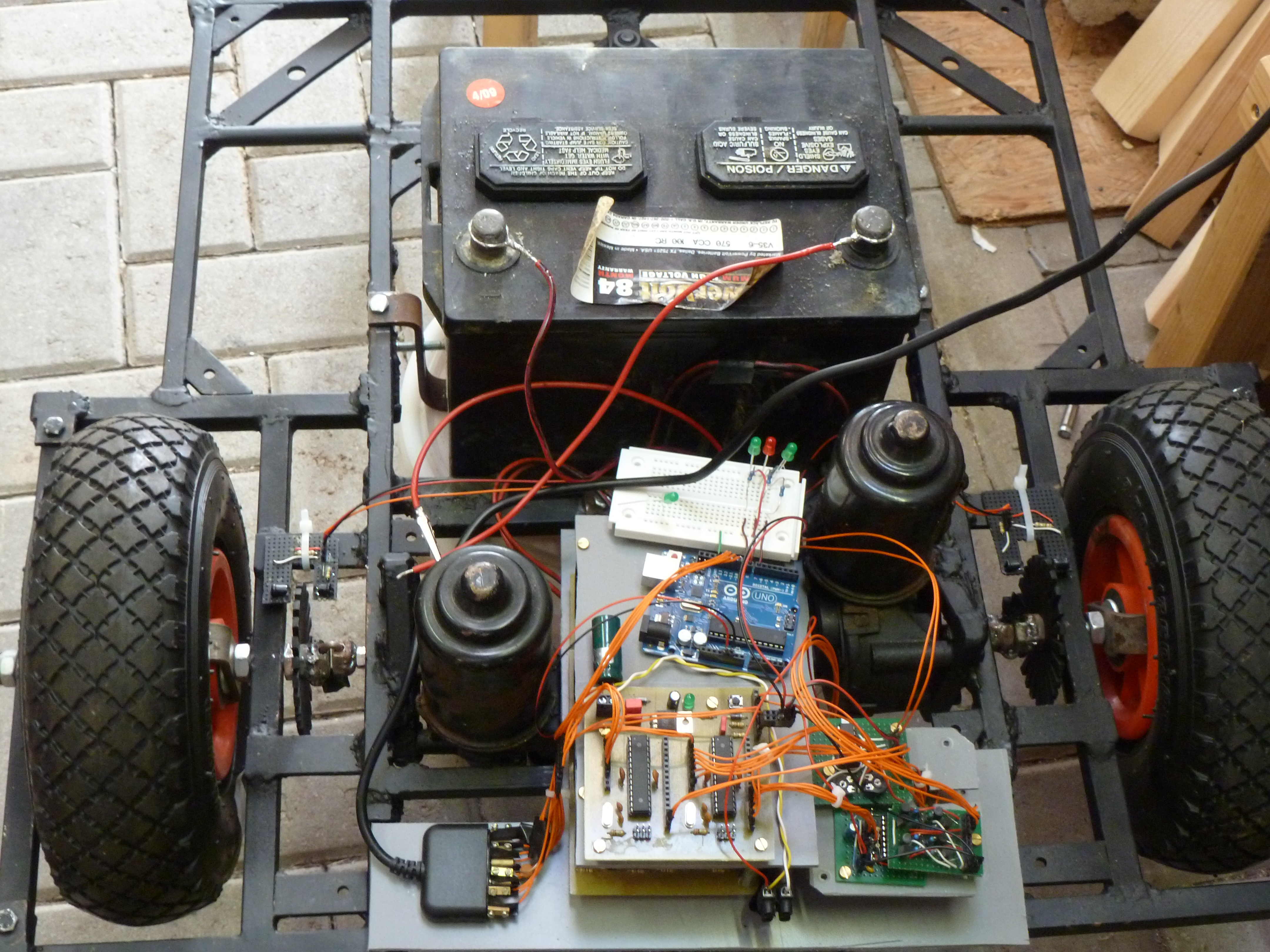 Der Arduino Uno und das Steckbrett sind für das Debuggen und In-Circuit-Programmierung
Der Arduino Uno und das Steckbrett sind für das Debuggen und In-Circuit-Programmierung
Nach einem Jahr Bauzeit waren wir zufrieden mit unseren Schöpfungen und endeten offiziell unser Werkstatt-Abenteuer, auch wenn es viel zu verbessern gegeben hätte. Ein paar Monate später nahmen wir mit den Robotern an Jugend-Forscht Teil. Wir haben viel Aufmerksamkeit und Lob ernten können und gingen mit einem Preis für beste interdisziplinäres Projekt nach Hause.
Nun sind die Fahrzeuge in unseren Garagen verstaut und ab und zu staube ich meinen ab und denke an die schöne Bauzeit zurück.
Ich hoffe Ihnen hat dieser Artikel gefallen und bedanke mich für die Aufmerksamkeit.
Wenn Sie noch mehr Bilder von den Panzern sehen wollen, hier habe ich eine Bildergalerie für alles, was es nicht in diesen Artikel geschafft hat.
